
ADAS(先進駕駛輔助系統)的關鍵技術在於複雜的交通狀況下,必須能保護乘客、司機和附近行人的生命安全,因此精準、可靠且值得信賴的定位功能就成為自駕車決定性的推動因素。
隨著各國法規逐步開放,加上AI、無線通訊與感測器等技術的快速發展,L2自駕已成為新車的必備功能,並逐步由L2+快速過渡到L3。然而自駕車(Autonomous Vehicle, AV)所需的ADAS設計技術頗為艱深,同時又面臨繁複的法律規範,開發工作相當具有挑戰性。關鍵技術在於複雜的交通狀況下,必須能保護乘客、司機和附近行人的生命安全,因此精準、可靠且值得信賴的定位功能就成為自駕車決定性的推動因素。
L2+以上自駕車必備規格:公分級定位精度
在全自駕車普及之前,自動駕駛很可能會先在路網(Road Network)的專用路段和特定操作條件下才能運作。例如,高速公路自動駕駛輔助系統(Highway Chauffeur)等級的自駕車,在特定地理範圍內才能啟動完全自駕功能。因應這樣的需求,加上自駕車技術也快速地演進,L2+以及L3等級以上更加需要精準的定位功能,公分等級的精準度將會變成為必備的規格,且必須搭配PPP-RTK加上完整性的校正服務,方能達到自駕車精準度的安全需求規格。
為了實現這個目標,只有更先進的多頻段與多星系GNSS接收器,方能可靠地在地圖上的特定車道內定位車輛。但是衛星訊號傳輸時還是會受到幾個誤差源的影響,包括衛星軌道和時鐘誤差,以及電離層和對流層效應,所有這些誤差源都會導致定位不夠精確。
RTK即時動態技術
RTK(Real Time Kinematic,即時動態)技術,是一個解決誤差的方法。RTK採用基於載波的測距,會計算衛星和GNSS接收器之間的波長數量,提供更好的定位精準度。但由於載波信號中不包含時間戳記(Timestamp)等訊息,因此計算波長數相當複雜。將未知數量的載波週期模糊度解析為整數的過程是RTK和公分級精準度的關鍵。在進行IAR(Integer Ambiguity Resolution,整數未定值解算)演算完成之前,系統必須糾正訊號中的誤差。如(圖1)所示,校正的數據由附近已知位置的當地參考站發送給GNSS接收器來做校正演算。目前全球已有多家GNSS增強服務提供商,包括私營公司以及政府機構。
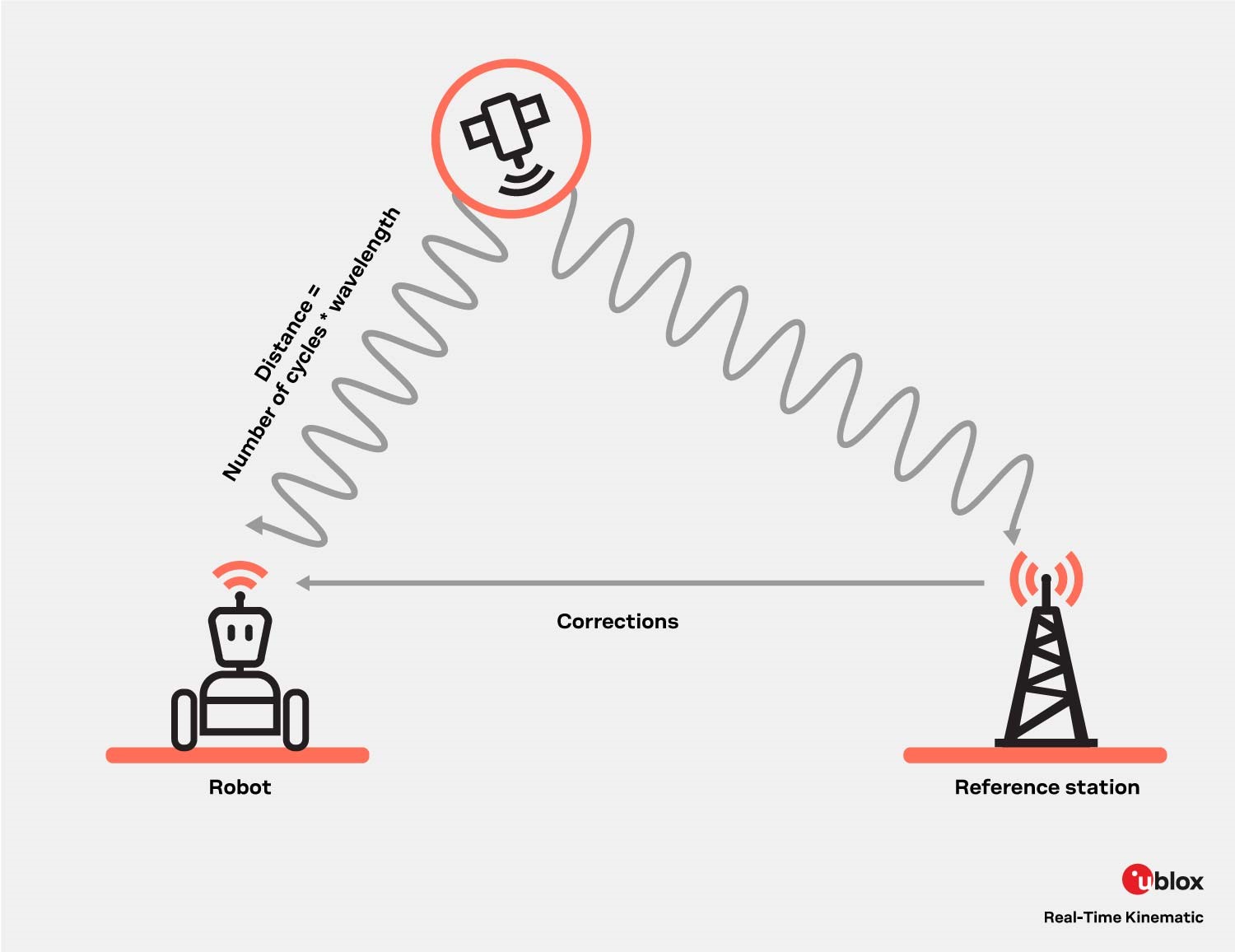 圖1、RTK GNSS數據校正示意圖
PPP精密單點定位技術
圖1、RTK GNSS數據校正示意圖
PPP精密單點定位技術
另一種精密單點定位(Precise Point Positioning, PPP)校正服務廣播,則建立GNSS誤差模型,可以在廣闊的地理範圍內有效運作。由於它只需要單向通訊(基於IP或通過衛星L頻段),因此可以向任意數量的GNSS接收器提供服務。傳統的PPP定位可以在3~30分鐘內提供精準度低於10公分的位置估計。
PPP-RTK融合技術+完整校正服務
融合PPP與RTK技術可以提供更精準而快速的定位服務,如(圖2)所示的PointPerfect是u-blox提供的先進GNSS增強服務,可以透過行動網路或L頻段衛星訊號,目前可在歐洲和美國進行均勻覆蓋的廣播,包括離海岸線約22公里以內的任意數量終端裝置,提供公分級的定位準確度,而且收斂時間僅需幾秒鐘。搭配PPP-RTK技術、加上完整校正服務的GNSS解決方案可作為安全絕對位置的必要保證,以補強其他相對定位解決方案(如雷達、光達),才能驗證是否能夠執行自動駕駛功能。如此GNSS接收器可通知汽車已進入高速公路的授權路段,讓駕駛知道可以開始啟動自駕功能。
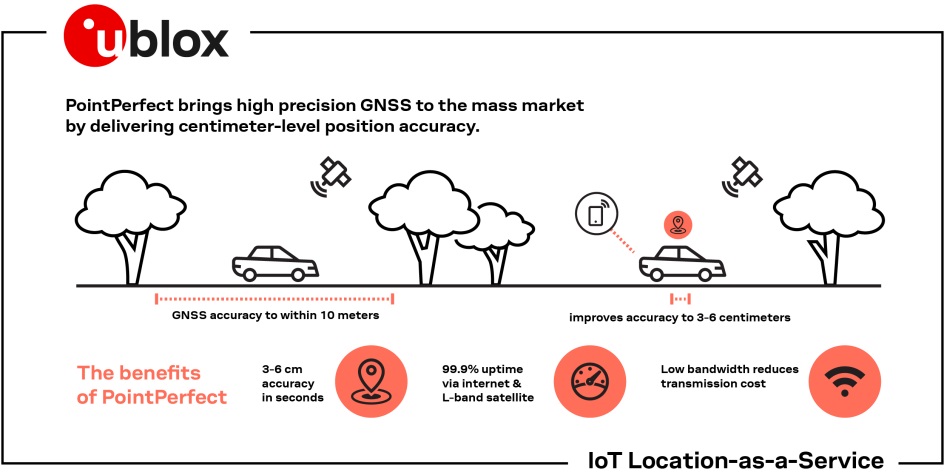 圖2、PointPerfect GNSS增強服務示意圖
GNSS接收器須具備抗干擾與防駭性能
圖2、PointPerfect GNSS增強服務示意圖
GNSS接收器須具備抗干擾與防駭性能
此外,GNSS衛星訊號很容易受到干擾或詐騙訊號的威脅——來自外部高頻雜訊的干擾,會導致接收器丟失位置訊息;而虛假的GNSS訊號則會通過顯示不同的位置或時間來詐騙用戶,因此接收器的抗干擾與防駭性能是務必要慎重選擇的。例如u-blox ZED-F9系列導航模組內建防干擾和防駭偵測的演算法,可確保車輛聯網防駭安全性。ZED-F9系列可同時接收多頻段與多星系GNSS衛星訊號,並支援PointPerfect GNSS增強服務,能隨時在數秒內提供公分級的精準度,是在設計ADAS安全精準導航功能模組時一個很好的選擇。
但是RF通路絕不是系統唯一的攻擊面,駭客還可以嘗試重新配置GNSS接收器,將IP連接定位到與之通訊的任何伺服器,或將GNSS接收器與主機之間的通訊做為目標。所有情況都表明需要在整個過程中考慮「端到端」的安全性,保護軟/硬體介面、驗證韌體、加密通訊,以及檢測並減輕干擾和詐騙所需的措施,這些也是ZED-F9系列導航模組的特有功能。
隨自駕車等級提高,GNSS技術將日益重要
在過去,汽車出廠時功能是固定的,但新的趨勢是,汽車的設計方式使其能在數年後進行軟體升級,以提供之前沒有的新功能。這通常需要在生產時先為汽車提供適當的硬體,以便一些進階功能在經過充分測試、驗證、授權並準備上路後即刻實現。這種趨勢將衝擊汽車OEM業者,對系統中重要零組件(包括GNSS接收器)的要求。
隨著汽車自主程度的提高,GNSS技術將扮演日益重要的角色。當汽車朝向更高等級的自駕功能發展時,將會有越來越多的先進功能需仰賴高精準度且安全的定位技術,因此GNSS接收器和相關的定位服務,包括GNSS校正數據與其他類型的GNSS 增強服務等,也將變得越來越重要。精準度校正服務配合感測器融合技術,實現確保功能安全的GNSS接收器,以符合ISO 26262/ ISO 21448規範,進而達到完整性風險度、保護級別以及功能可用性三者規格之間的最佳權衡,這是邁向未來自駕進階的必要條件。